Multivibrator
Multivibrator adalah sebuah sirkuit elektronik yang digunakan untuk bermacam-macam sistem dua keadaan seperti osilator, pewaktu, dan register. Ini bercirikan dua peranti penguat (transistor, tabung hampa, op-amp, dll) yang dikopel-silang oleh jaringan resistor dan kondensator. Bentuk paling umum adalah tipe takstabil yang menghasilkan gelombang persegi. Multivibrator mendapatkan namanya karena isyarat kekuasannya kaya akan harmonik. Multivibrator berasal dari istilah yang digunakan oleh William Eccles dan F.W. Jordan pada tahun 1919 untuk sirkuit tabung hampa yang dibuatnya.
Jenis- jenis multivibrator :
Jenis- jenis multivibrator :
- Multivibrator takstabil, dimana sirkuit tidak stabil pada salah satu keadaan, ini berosilasi terus-menerus dari satu keadaan ke keadaan lainnya.
- Multivibrator ekamantap, dimana salah satu keadaan adalah stabil, tetapi yang lainnya takstabil. Sirkuit akan berubah ke keadaan takstabil untuk waktu tertentu, tetapi akan selalu kembali ke keadaan stabil. Sirkuit ini berguna untuk membuat pewaktuan dengan jeda tetap untuk menanggapi isyarat luar.
- Multivibrator dwimantap, dimana sirkuit akan tetap berada pada salah satu keadaan. Sirkuit dapat diubah dari satu keadaan ke keadaan lainnya dengan penyulut eksternal. Sirkuit ini adalah blok fasis dari register dan memori digital.
Flip-flop adalah rangkaian digital yang digunakan untuk menyimpan satu bit data secara semi permanen sampai ada suatu perintah untuk menghapus atau mengganti isi dari bit yang tersimpan tersebut. Prinsip dasar dari flip-flop adalah suatu komponen elektronika dasar seperti transistor, resistor dan dioda yang di rangkai menjadi suatu gerbang logika yang dapat bekerja secara sekuensial.
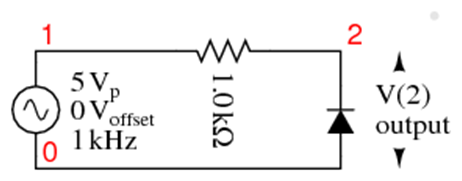
Contoh rangkaian

Ketidakliniernya berada di kapasitor C1 dan C2, karena diperlukan waktu untuk mengisi, tergantung dengan nilai R2 dan R3